Nachdem das ganze Gerümpel ein paar Wochen in der Ecke lag begann ich mir Gedanken zu machen wie, bzw. womit ich das Modell ansteuern wollte, ob ich ein Bedienpanel mit verbauen sollte, usw…
Dass ich die Steuerung über eine alte Siemens S5 SPS vornehmen wollte stand relativ schnell fest.
Aber wie sollen die Interfaces aussehen ?!
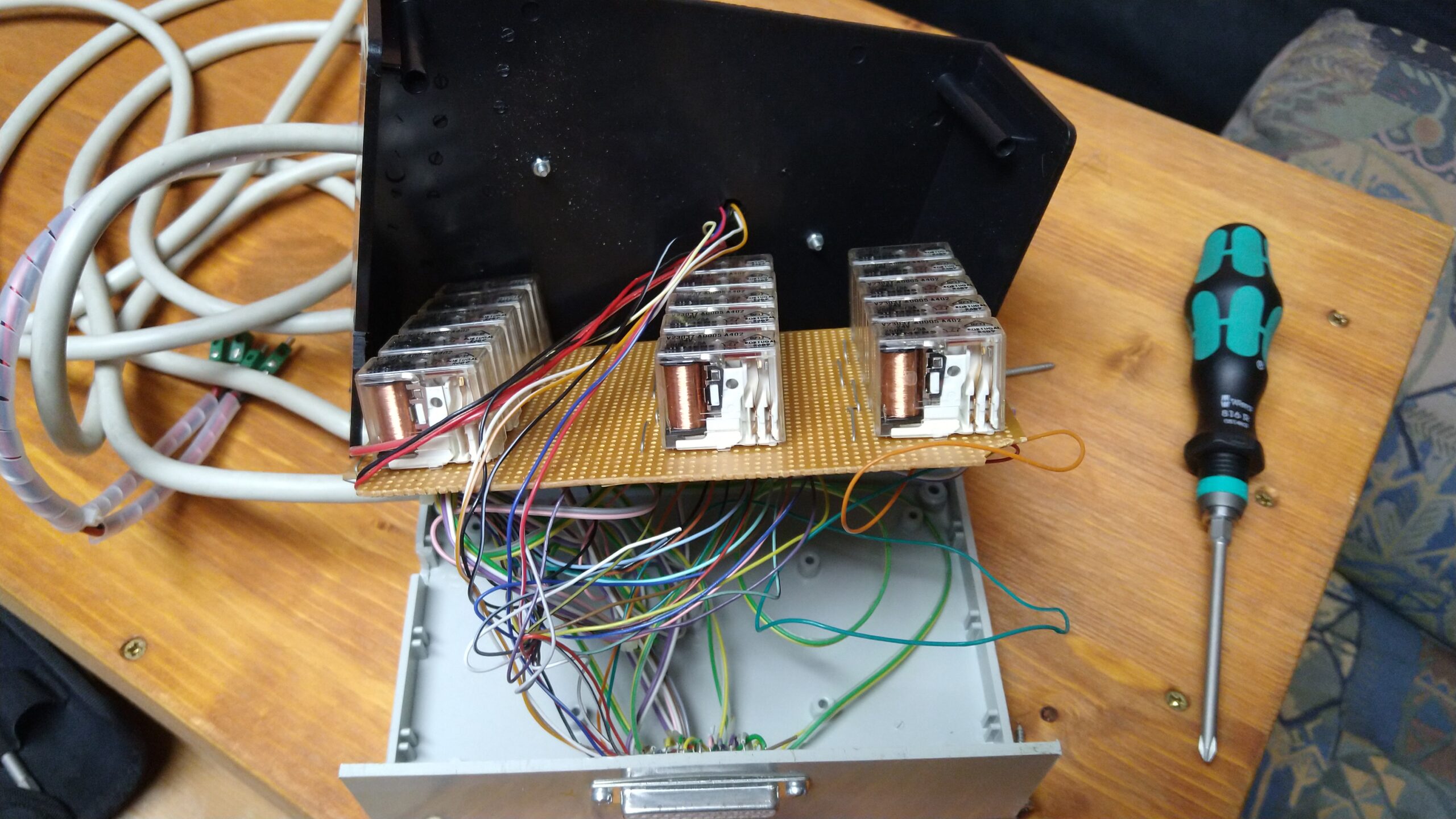
Auf dieses Relaisgedöns was bei dem Modell dabei war wollte ich gerne verzichten.
Würde mich mal interessieren ob das was auf den Fotos zu sehen ist die so genannte Relaisstation aus den Unterlagen sein soll – ich finde das ganze schaut recht unprofessionell aus.

klicken zum vergrößern
klicken zum vergrüßern
Meine Interfaces sollten Elektronisch und universell bzw. spannungsunabhängig sein.
Wieso überhaupt Interfaces ?
Die Siemens S5 SPS arbeitet mit 24V, die Aktoren (Motoren, Lampen…) von dem Modell mit 6V.
Das ist untereinander nicht kopatibel, daher muss ein Interface, bzw. mehrere her.
Wieso universell und spannungsunabhängig ?
Die Motoren, Lampen usw. von Fischertechnik waren bis Anfang der 90er Jahre für 6V ausgelegt, dnach für 9V.
6V Motor funktionieren auch an 9V ohne dass sie kaputt gehen, aber 9V Motore an 6V – da passiert nicht viel.
Ich möchte auch nicht unbedingt versuchen wie lange eine seltene 6V Linsenbirne für eine Lichtschranke mit 9V klar kommt, bevor die PITSCH macht.
Dazu gab es vor der Spannungsänderung der Fischertechnikteile für die Lehrmodelle auch schon spezielle Aktoren (Motore usw.) die eine Spannung von 24V benötigen, damit diese ohne Interface direkt an eine SPS angeschlossen werden konnten.
Was einfache Sensoren wie Schalter, Taster, lichtempfindliche Widerstände und ähnlich angeht – denen ists egal mit was für einer Spannung die arbeiten.
Interessant wird es aber durchaus wieder bei den speziellen Kabellichtschranken von Fischertechnik, die nur eine Spannung von 5V vertragen, wenn man die speziellen 2-Draht Initiatoren von Fischertechnik verwenden möchte, oder wenn man Indusriesensoren anschließen möchte wovon die meisten eine Spannung zwischen 10V und 30V benötigen.
Das ganze ist halt alles nicht so einfach 😀
Dazu wollte ich, dass wegen der Optik eine Interfaceplatine nicht breiter sein sollte als eine Siemens S5 Eingangs, bzw. Ausgangsbaugruppe und möglichst die 8 Signale der jeweiligen SPS Karte verarbeiten kann.
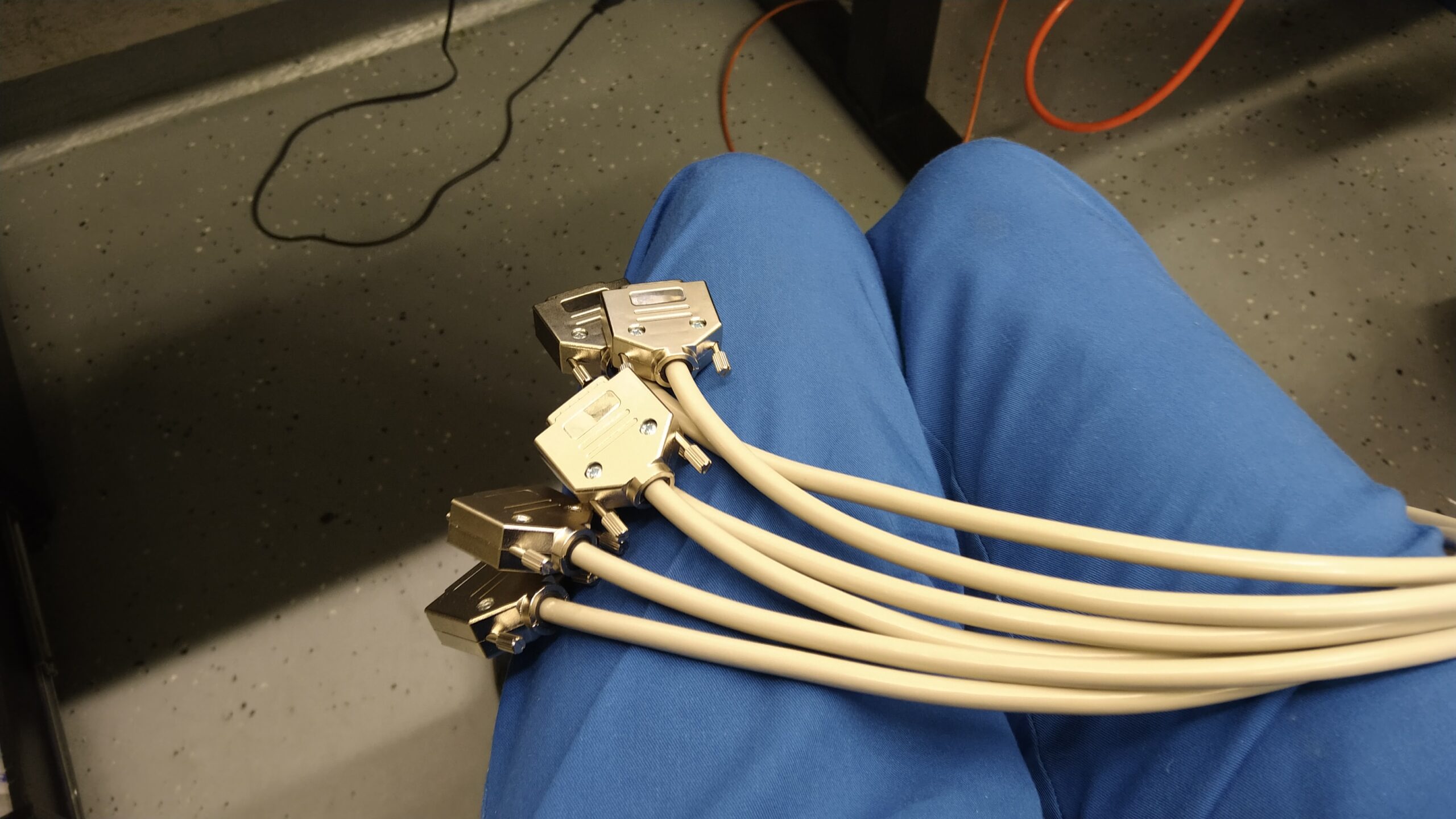
Ferner sollte die Verbindung vom Interface zur SPS Baugruppe vernünftig erfolgen – ich entschied mich für eine 15 pol. SUB-D Verbindung.
im März ’23 Ich hatte dann einfach mal angefangen das Interface zum ansteuern der Motore (SPS Ausgangsbaugruppe) zu entwickeln, da ich mir noch nicht im klaren war wie ich mit den verschiedenen Eingangssignalen umgehen sollte.
Recht schnell stellte sich heraus, dass die erste Umsetzung Mist war 😬
Mit einem Drehschalter wollte ich den Spannungsbereich (6V, 9V, 24V) einstellbar machen. Der Schalter nahm alleine schon einfach zu viel Platz weg, sodass ich einen Teil der Elektronik als Sandwichplatine nur oben drauf setzen konnte, damit das Interface nicht einen halben Meter lang wird.
Gefiel mir so nicht, dazu sind die Drehschalter einfach zu klobig und dazu zu teuer.
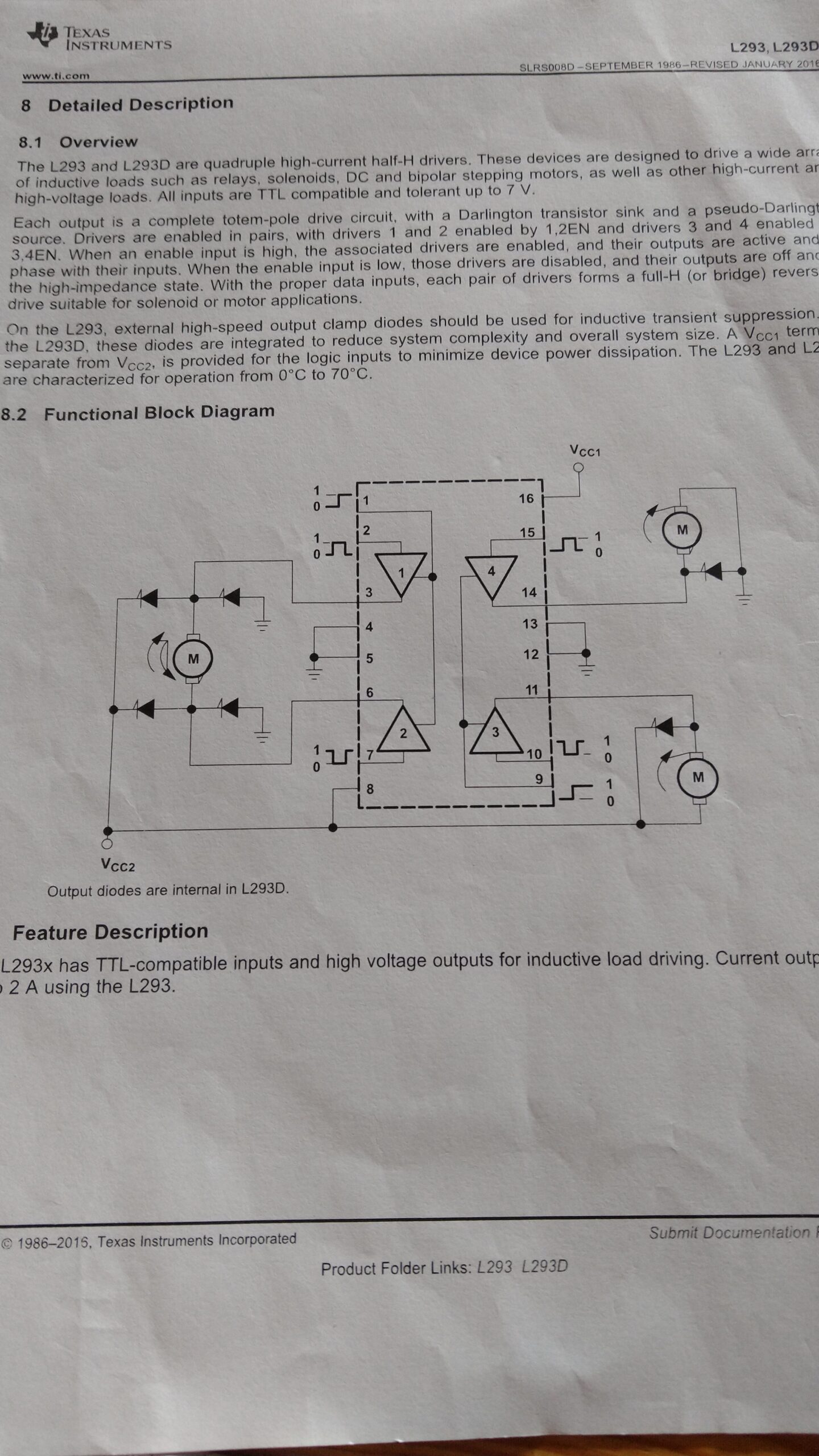
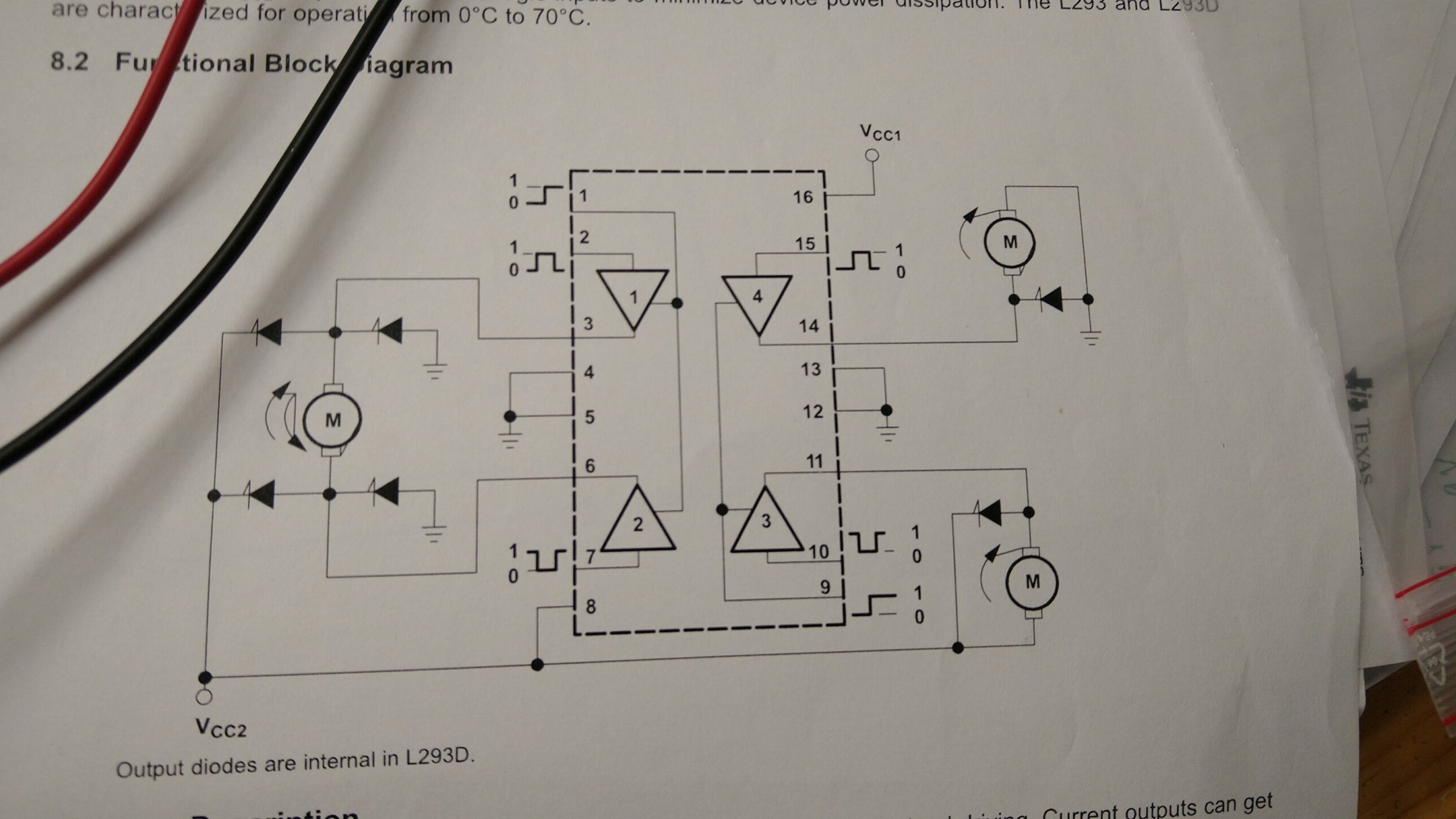
Das Herz der Schaltung war beim ersten Versuch bereits das Motortreiber IC LN293D, welcher in der Ausführung „NE“ einen Strom von bis 1A verarbeiten kann.
Mit einer Motorapannung von 4,5V – 36V deckt das IC die verschiedenen Versorgungsspannungen (6V, 9V, 24V) der Fischertechnikmotore ab.
Wenigstens konnte ich schon mal die in der Zwischenzeit angekommenen Bundhülsen für die Fischertechnikstecker und die WAGO-Klemmen für die Querverbindungen der einzelnen Interfaces testen 🙂

Zwischendurch machte ich mir auch Gedanken zu den Interfaces für die verschiedenen Eingangssignale und hab mal was aufgekritzelt was sich recht schnell aus als Mist entpuppte 😬
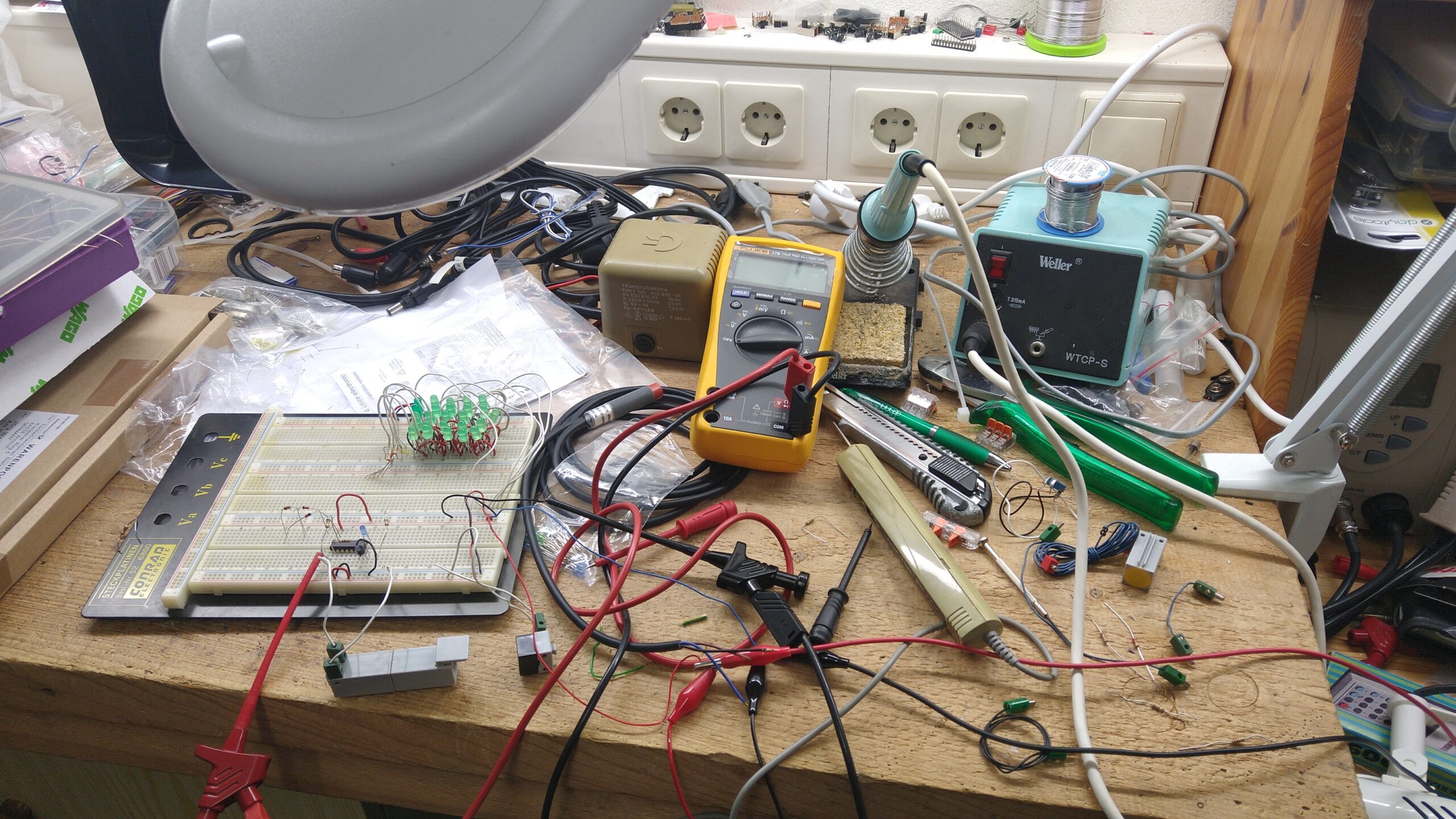
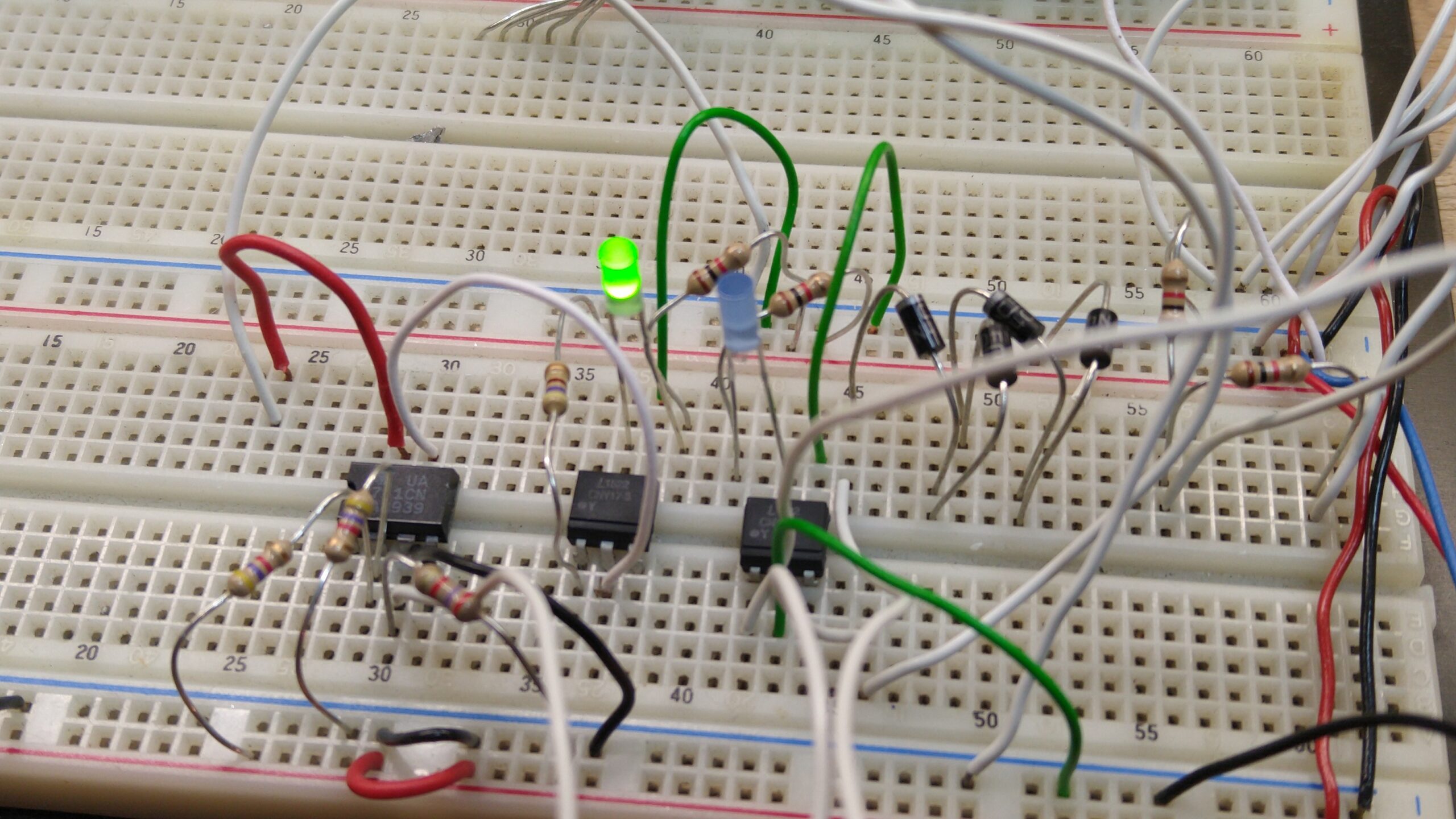
Ich begann einfach mal am Steckboard etwas zu experimentieren, da es bereits schon Anfang Mai war und ich mit dem Projekt mal so langsam vorankommen wollte.
Für die ersten versuche diente ein Schmitt Trigger IC – die Ergebnisse waren leider nicht zufriedenstellend.
Auf dem linken Bild ist ein Fischertechnik Initiator zu sehen, der auf Metall reagiert, auf dem rechten teste ich die Lichtschranke, die in diesem Fall aus einer Linsenlampe und einem lichtempfindlichen Widerstand besteht.
In den Videos ist noch ein kapazitiver Industriesensor zu sehen, dieser reagiert in disem Fall auf so ziemlich alles was sich ihm nährt.

hier zwei Videos:
Wie in den Videos zu sehen ist ist gab es Probleme mit Streulicht, und der Signalauswertung beim Betrieb mit dem Initiator – die LED ist nur am flackern.
Was tun ?!
Aus den Unterlagen zu dem Fischertechnikinitiator wurde ich auch nicht so richtig schlau.


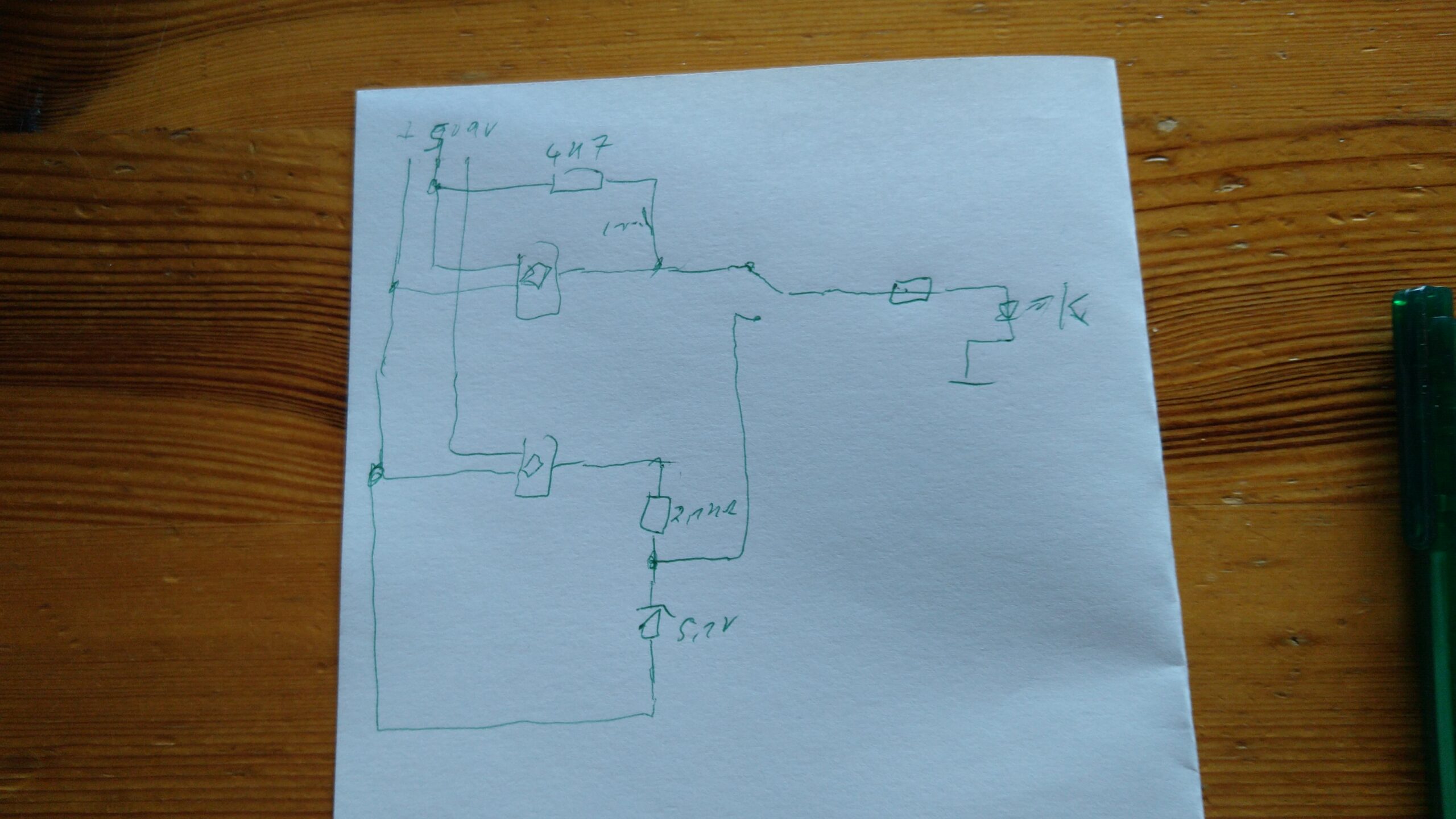
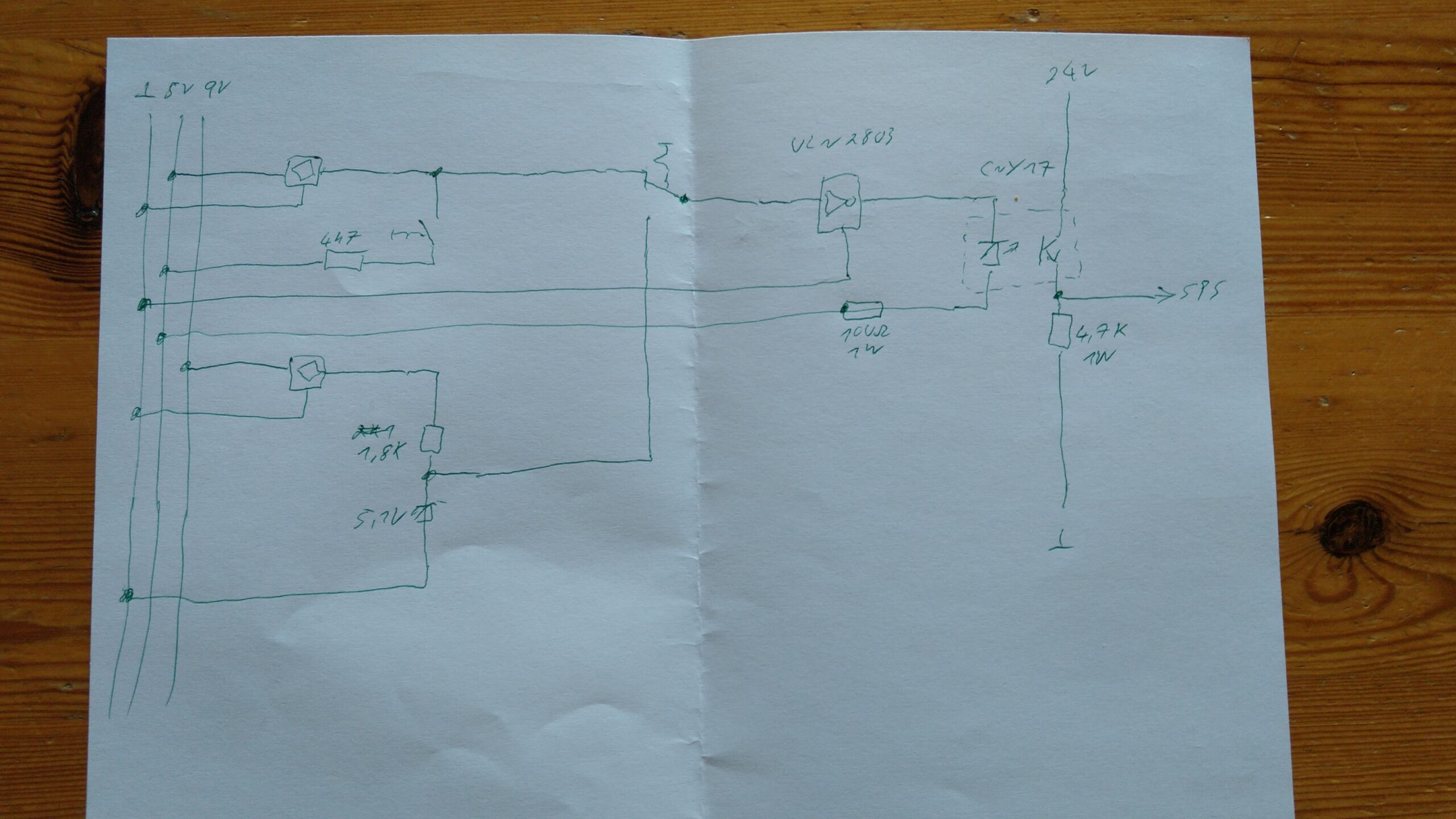
Ich hab ein paar Tage später dann mal ähnlich den Unterlagen einen Versuch mit einem Operationsverstärker aufgebaut und getestet.
JA, zu dem Fischertechnikmodell auf dem Foto wird es irgendwann noch einen Extra Eintrag geben 😉 – das stand da nur so rum, da ich für die Versuche auf die schnelle einen Initiator brauchte, den ich da juste gemopst hatte.
auch hier zwei Videos:
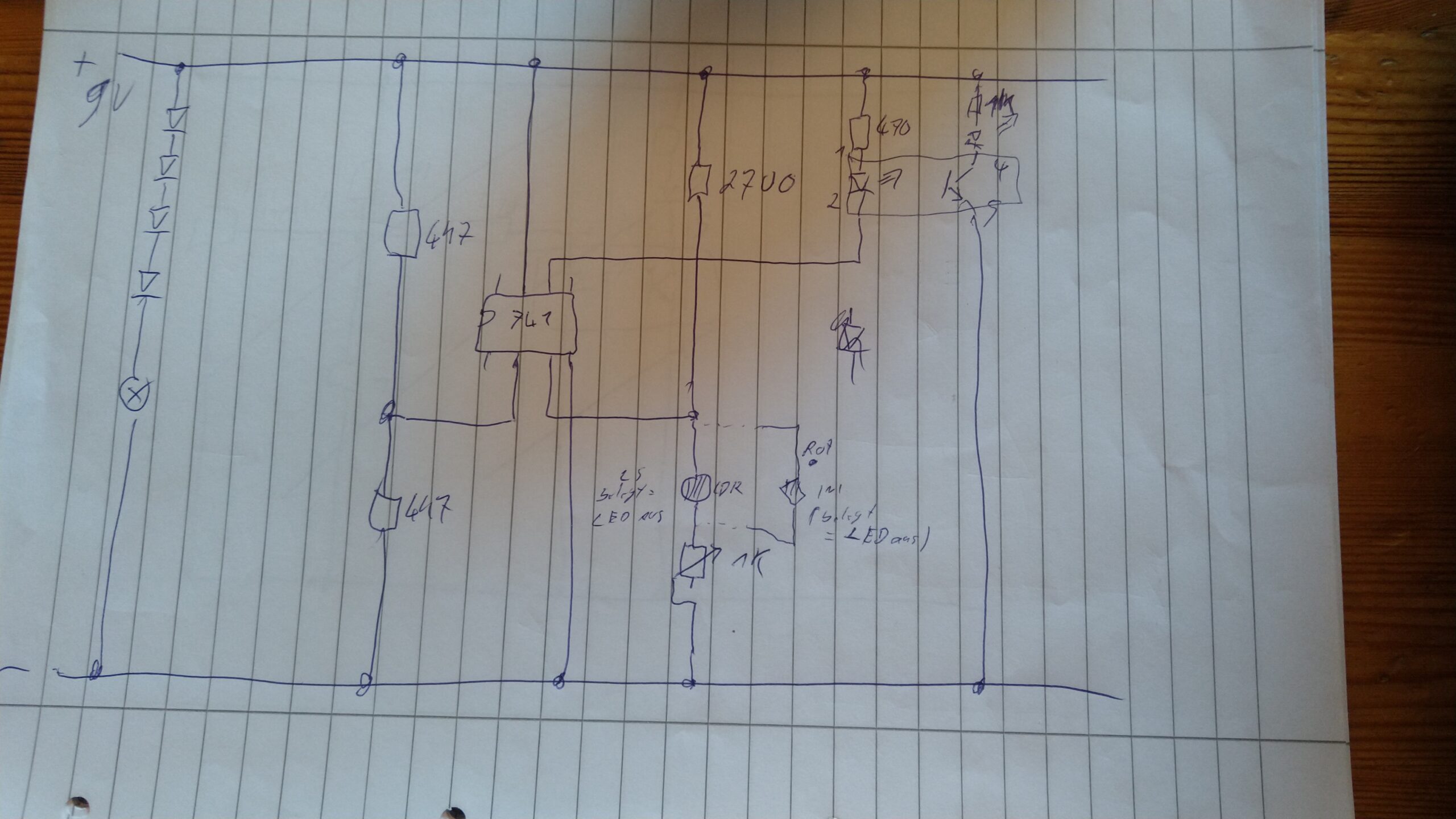
„Die Schaltung mit Operatiosverstärker funktionierte für die Lichtschranke und auch dem Initiator überraschend gut 😳
Damit konnte ich doch was anfangen und es ging endlich weiter 🙂
Den „Schaltplan“ hab ich dann mal für schlechte Zeiten festgehalten 😙
Zwichendurch gabs dann auch mal was einfaches 🙂
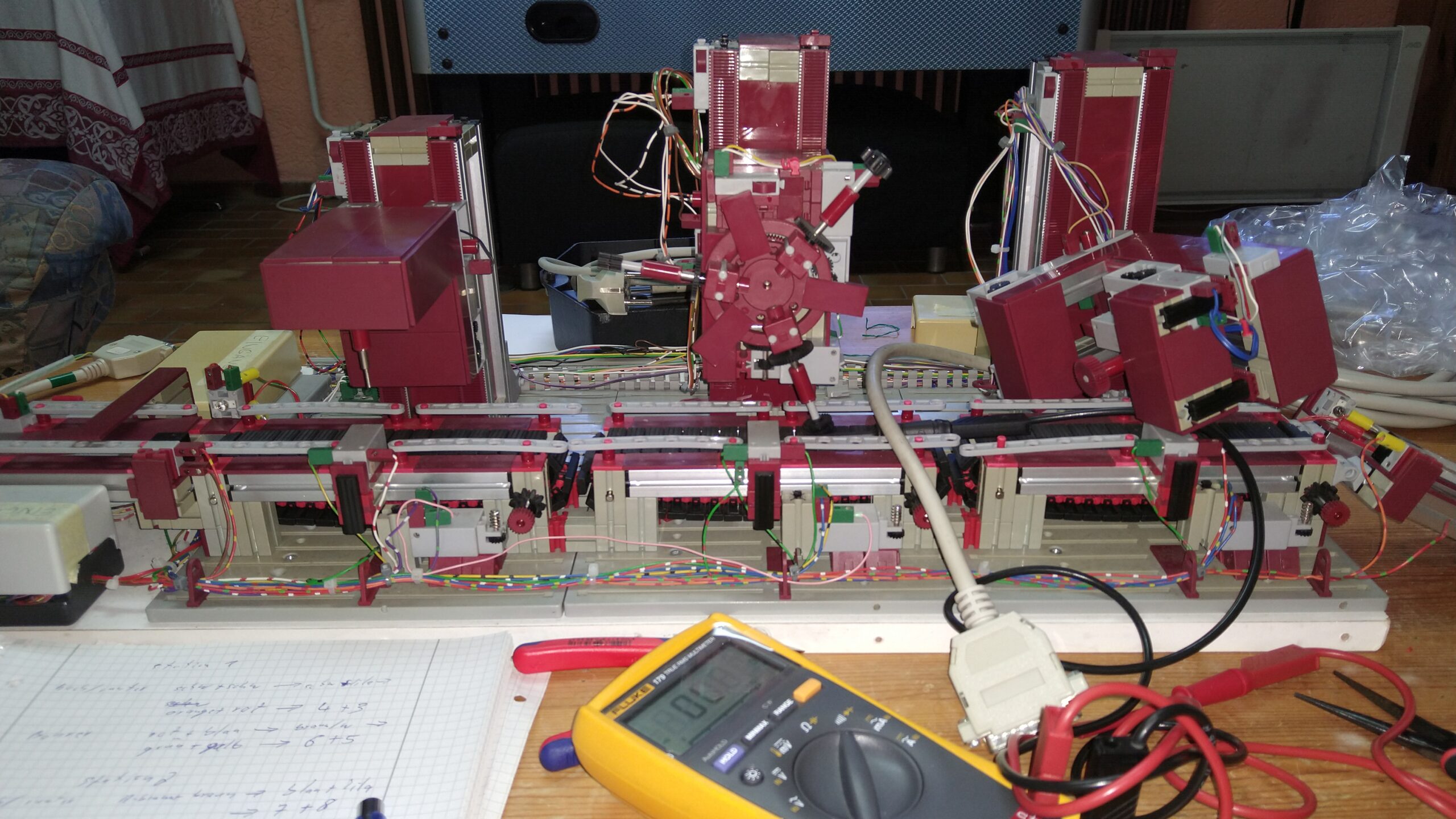
Vorbereitung der Anschlußkabel zwischen den Interfaces und den SPS Modulen.

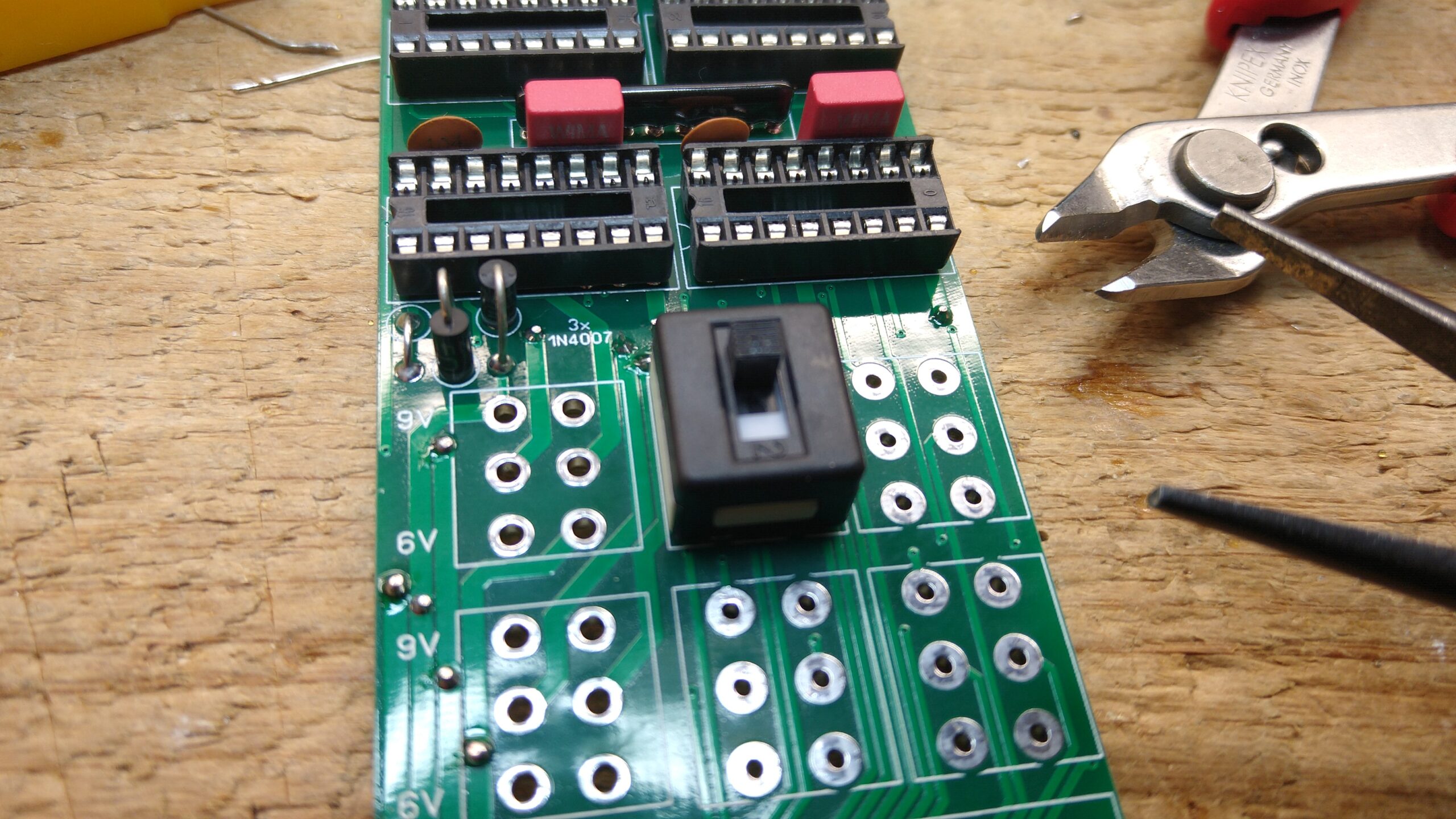
Da die erste Version der Ausgangsinterfacekarten ja nun Mist war entschied ich mich bei der nächsten Version Kipp- und Schiebeschalter zu benutzen.
Mit den Kippschaltern sollte man zwischen den Spannungen 6 und 9 V wählen können, mit den Schiebeschaltern ob man über zwei Signale einen Motor rechts und links laufen lassen wollte, oder zwei Motore jeweils in einer Richtung.
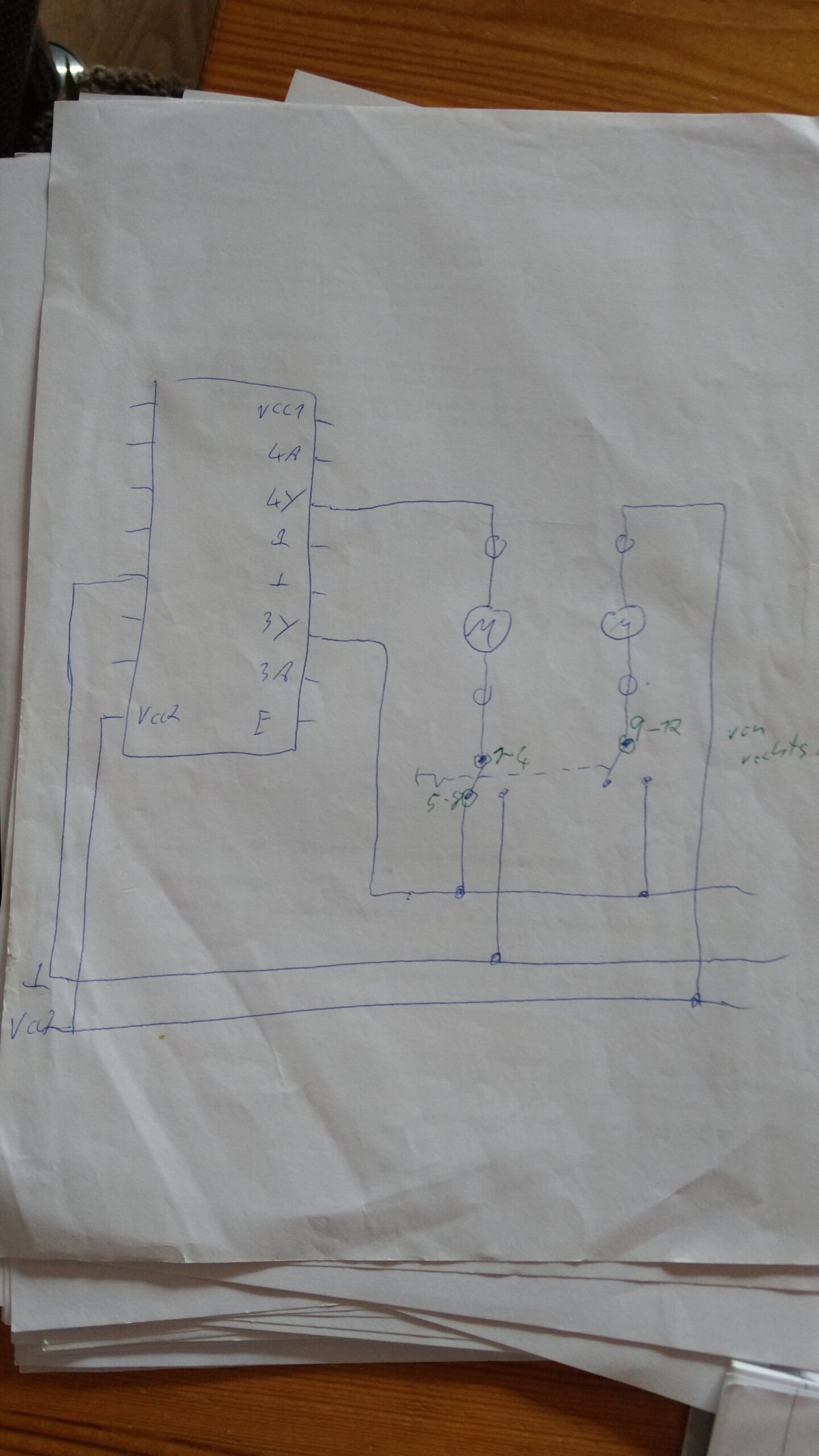
Hier die Anschlußübersicht des LN293 ICs und meine Überlegung dazu wie ich mit einem 2 pol. Umschalter wählen konnte, ob zwei einzelne Motore, oder einer für links/rechtslauf:
So ziemlich parallel dazu habe ich dann auch das Eingangsinterface für Taster, Schalter und Industriesensoren entwickelt. Ein Intercace für die Fischertechniksensoren und Lichtschranken folgte später.
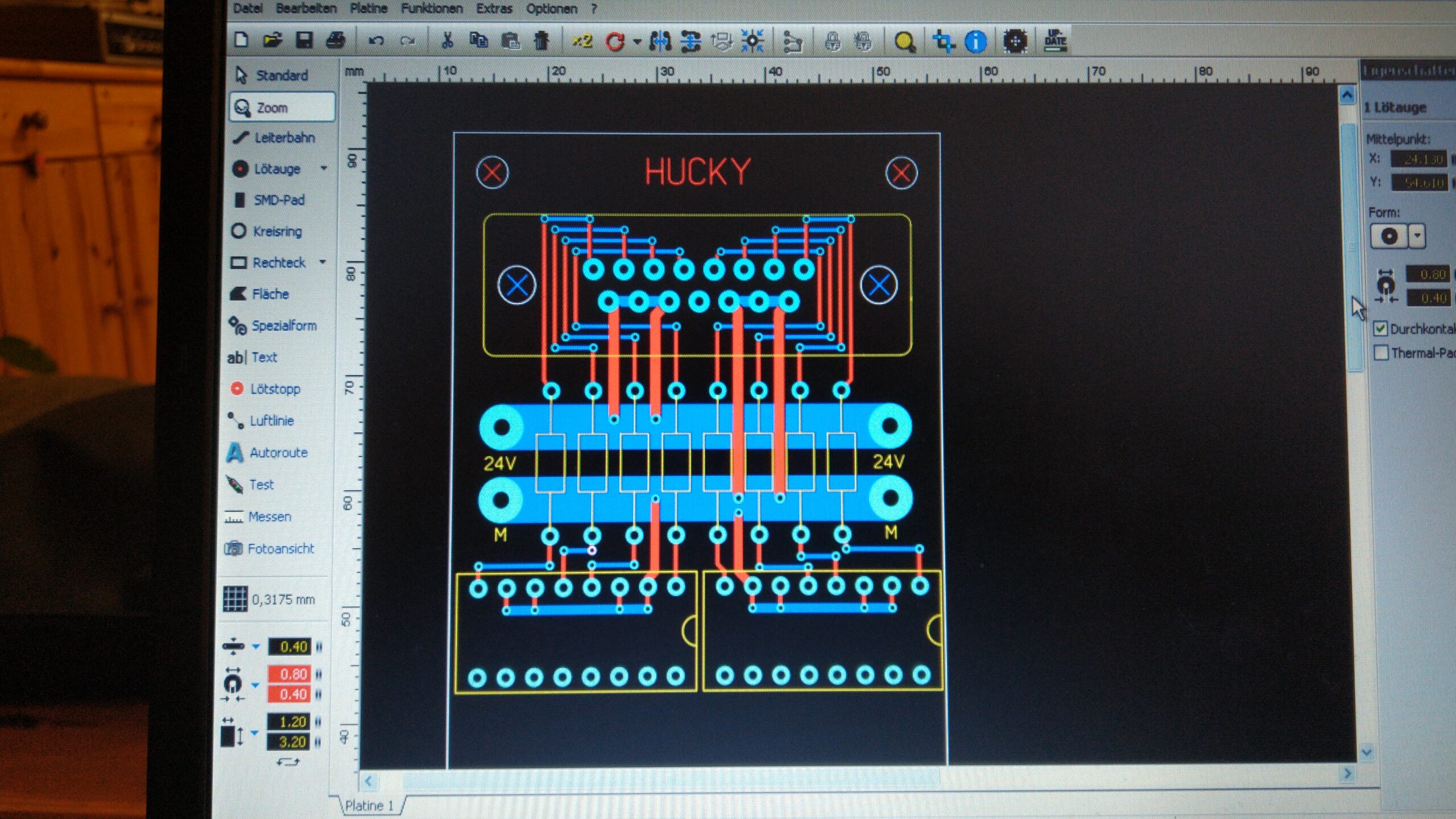
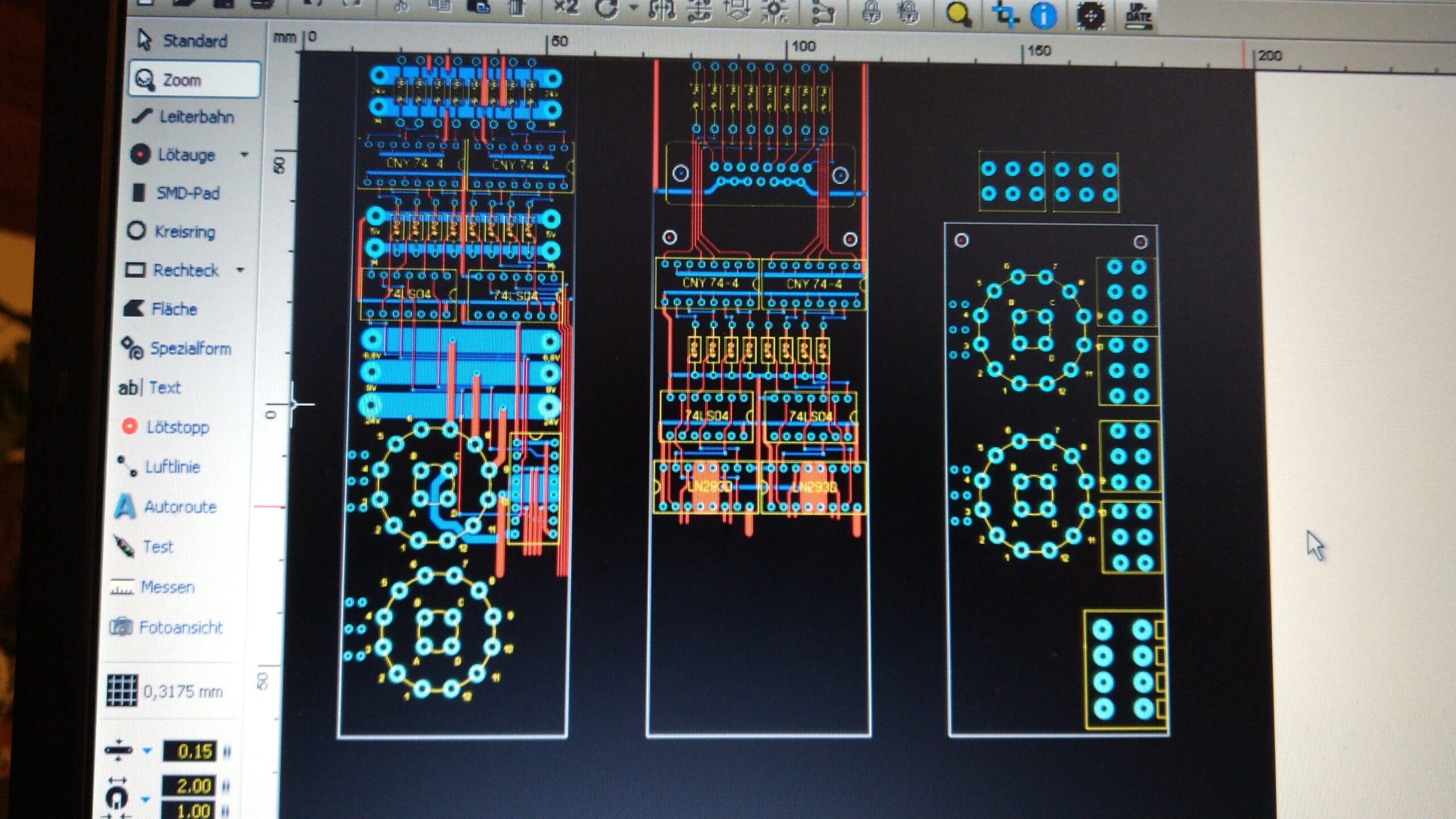
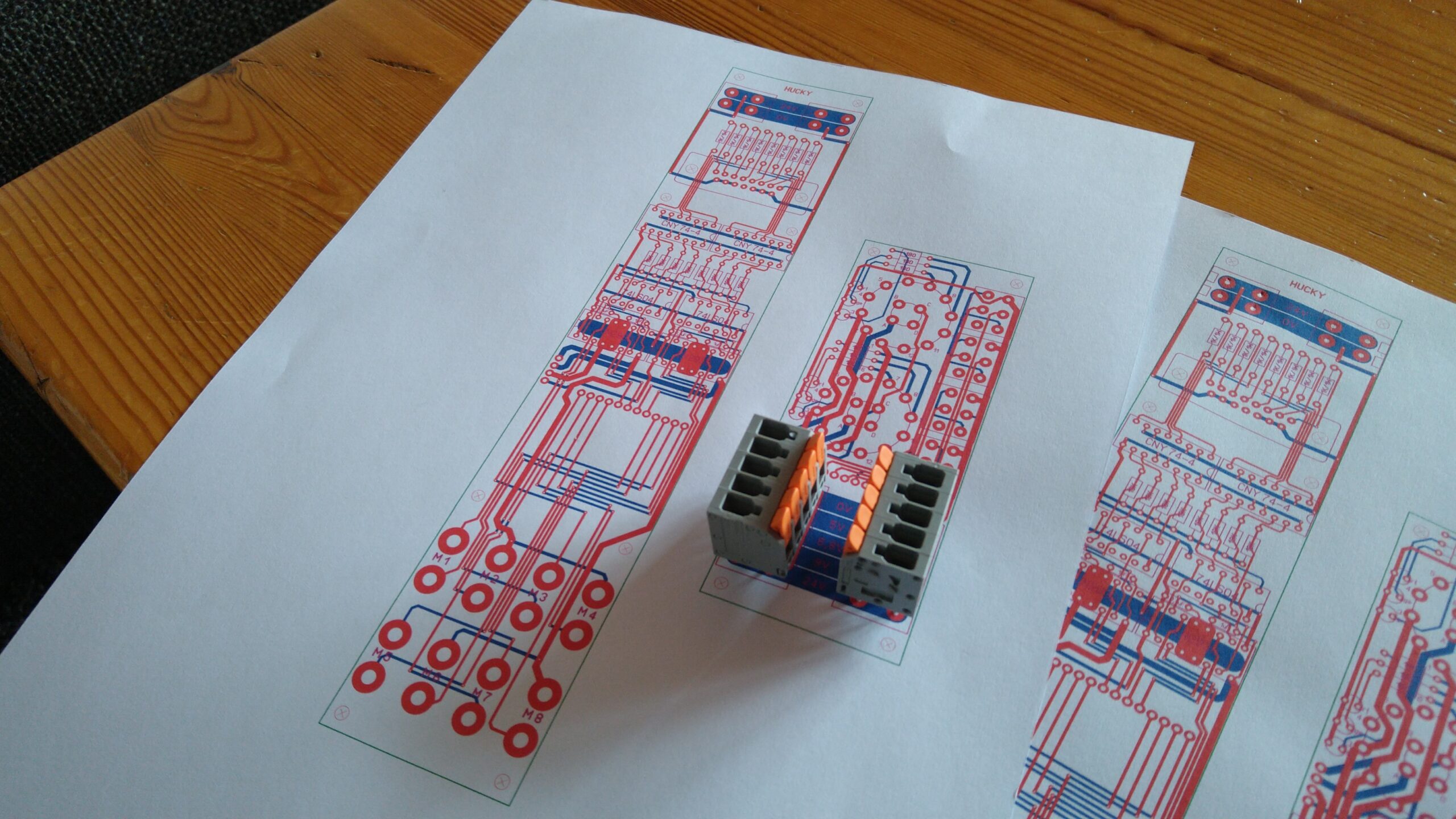
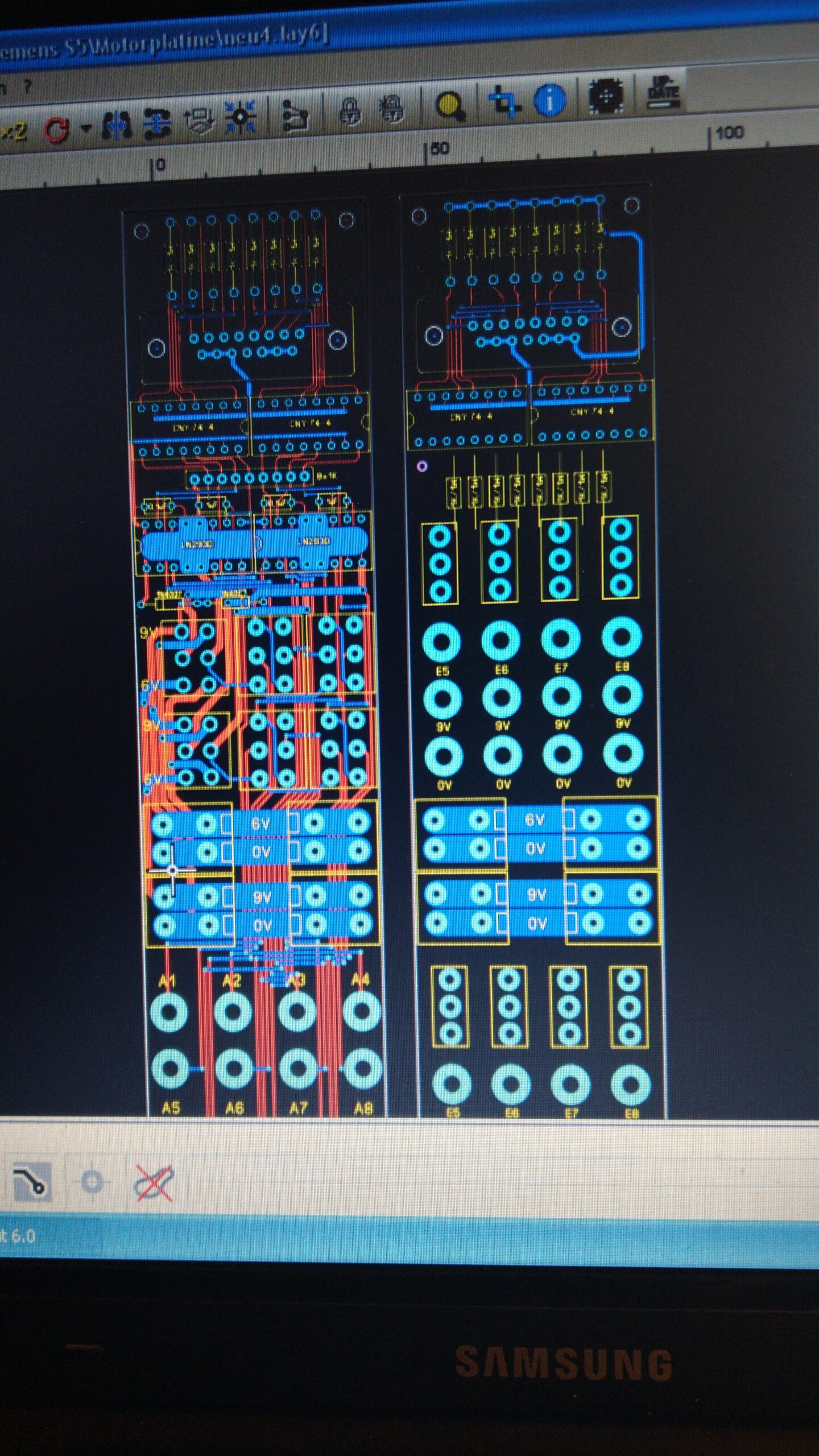
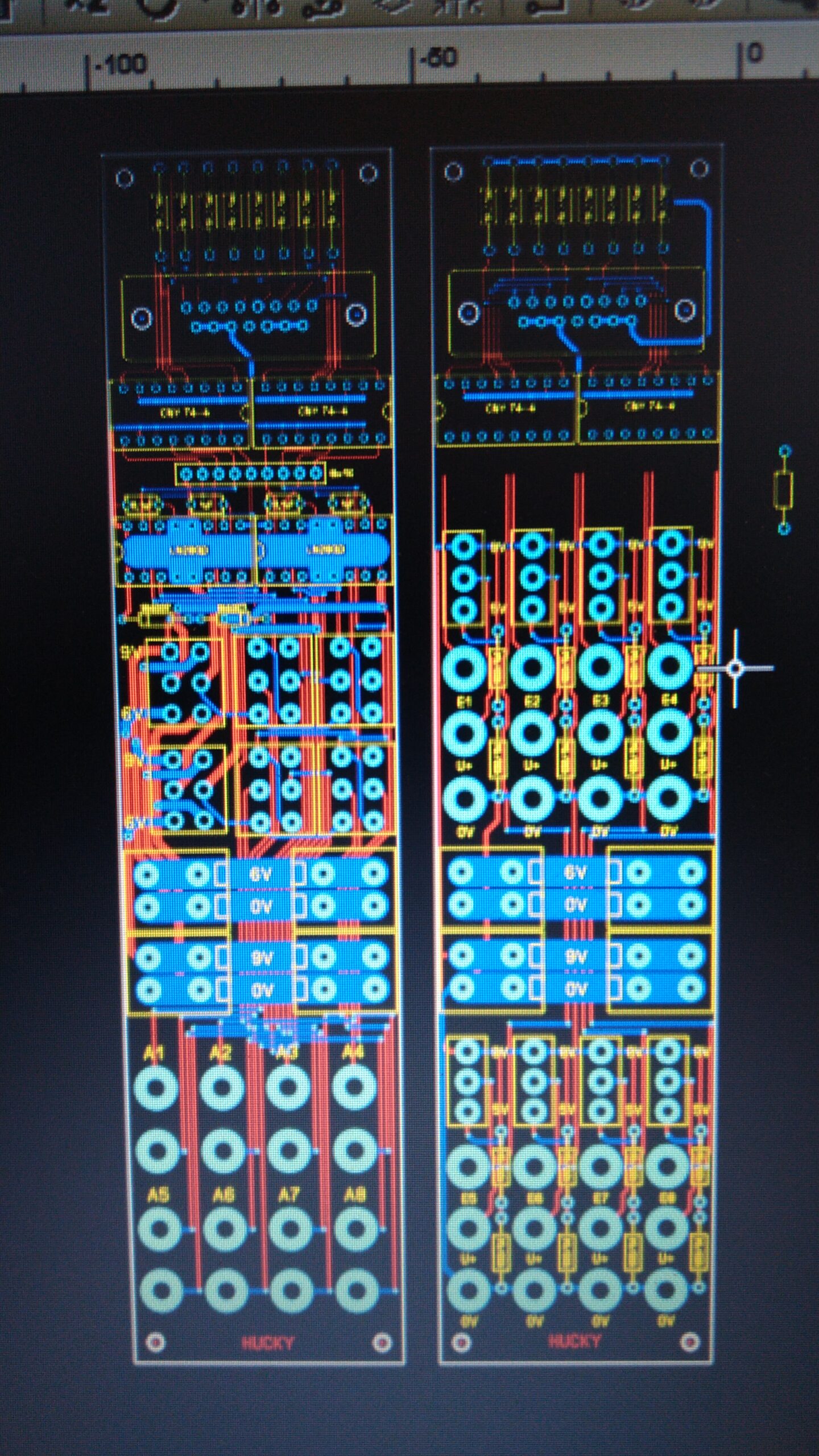
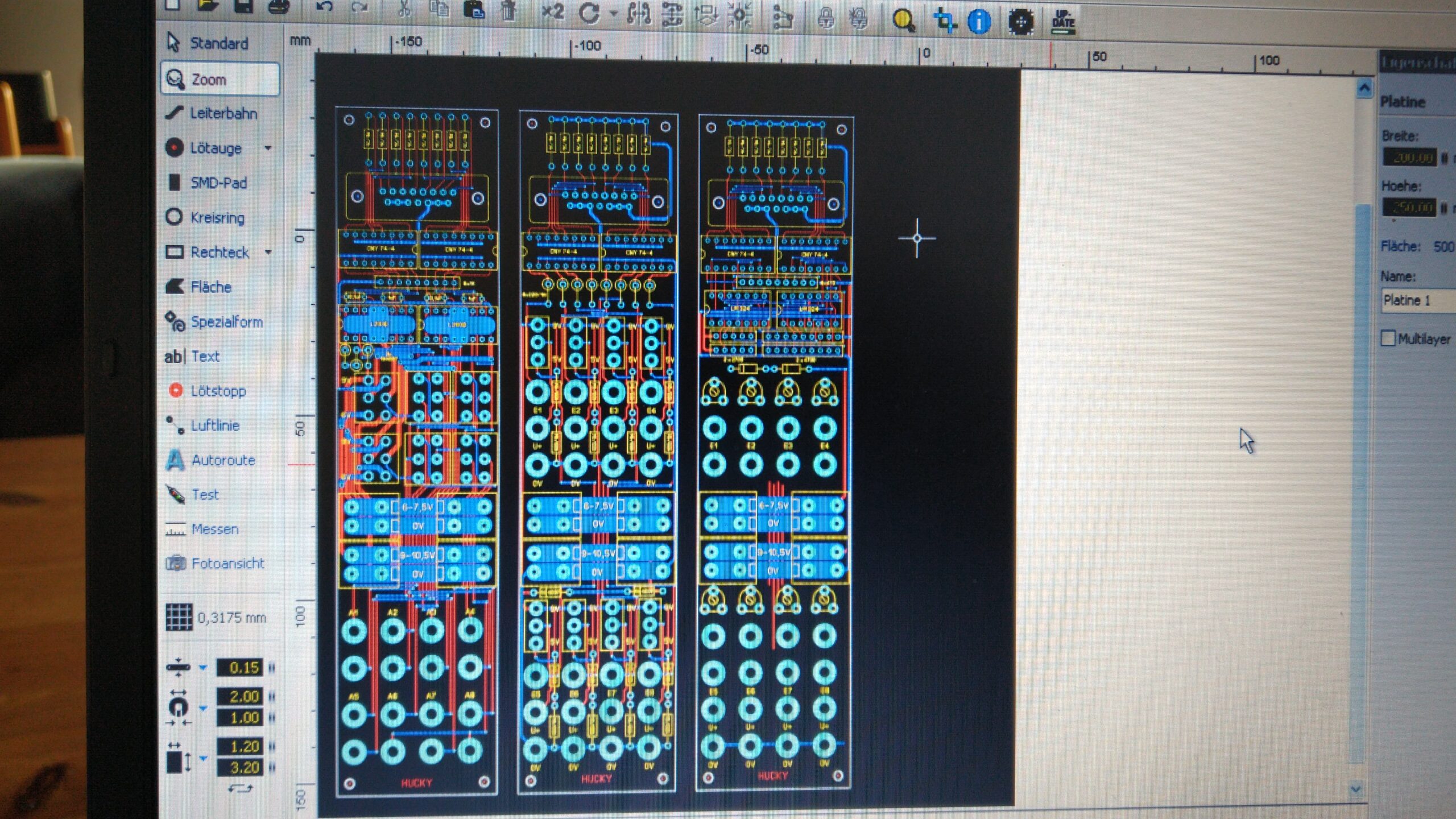
Die Platinenlayouts sahen Ende Mai ’23 dann so aus:
Obwohl die Platinenlayouts schon fast fertig waren hatte ich noch garnicht getestet mit einem Motortreiber IC die Fischertechnik Motore laufen zu lassen. Vielleichtist das IC ja doch zu schwach.
Das laouten machte so viel Spaß, dass ich immer nur dachte:
och wird schon irgendwie funktionieren 🙄
Tat es zum Glück dann auch 😀

hier zwei Videos wobei man im ersten sehen kann, dass über zwei Signale – in diesem Fall zwei Taster – jeweils ein Motor in eine Richtung läuft,
beim zweiten Video läuft ein Motor über zwei Signale in beide Richtungen.
Mitte August ging es mit den Platinenlayouts auf die Zielgerade und ich hielt bereits Anfang September ’23 die fertigen Platinen in den Händen 🙂

Ich konnte es nicht abwarten und musste am selben abend noch eine Platine zusammenlöten 😁
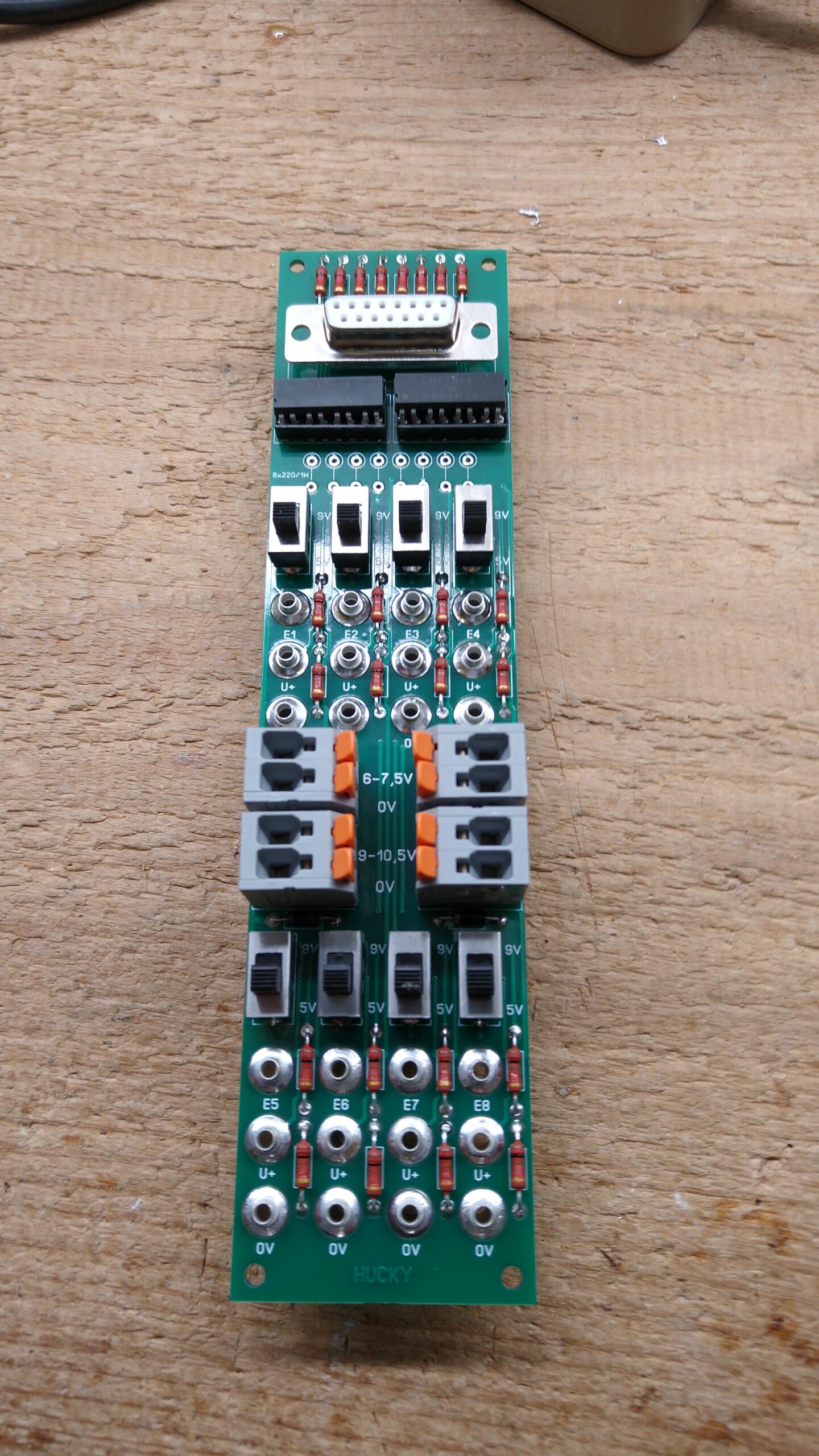
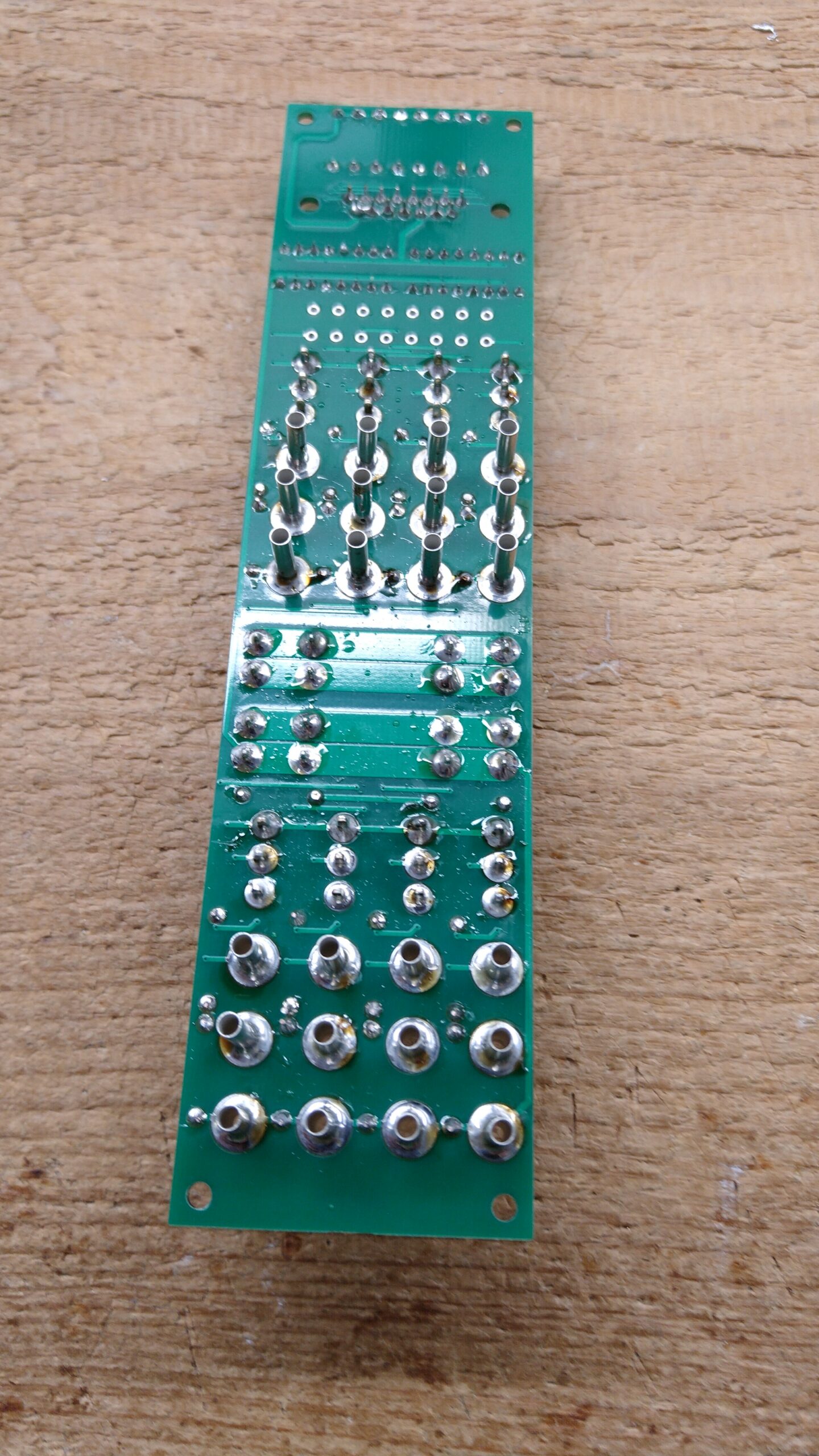
eine Woche später ging es dabei eine Ausgangsinterfaceplatine zusammenzulöten 🙂
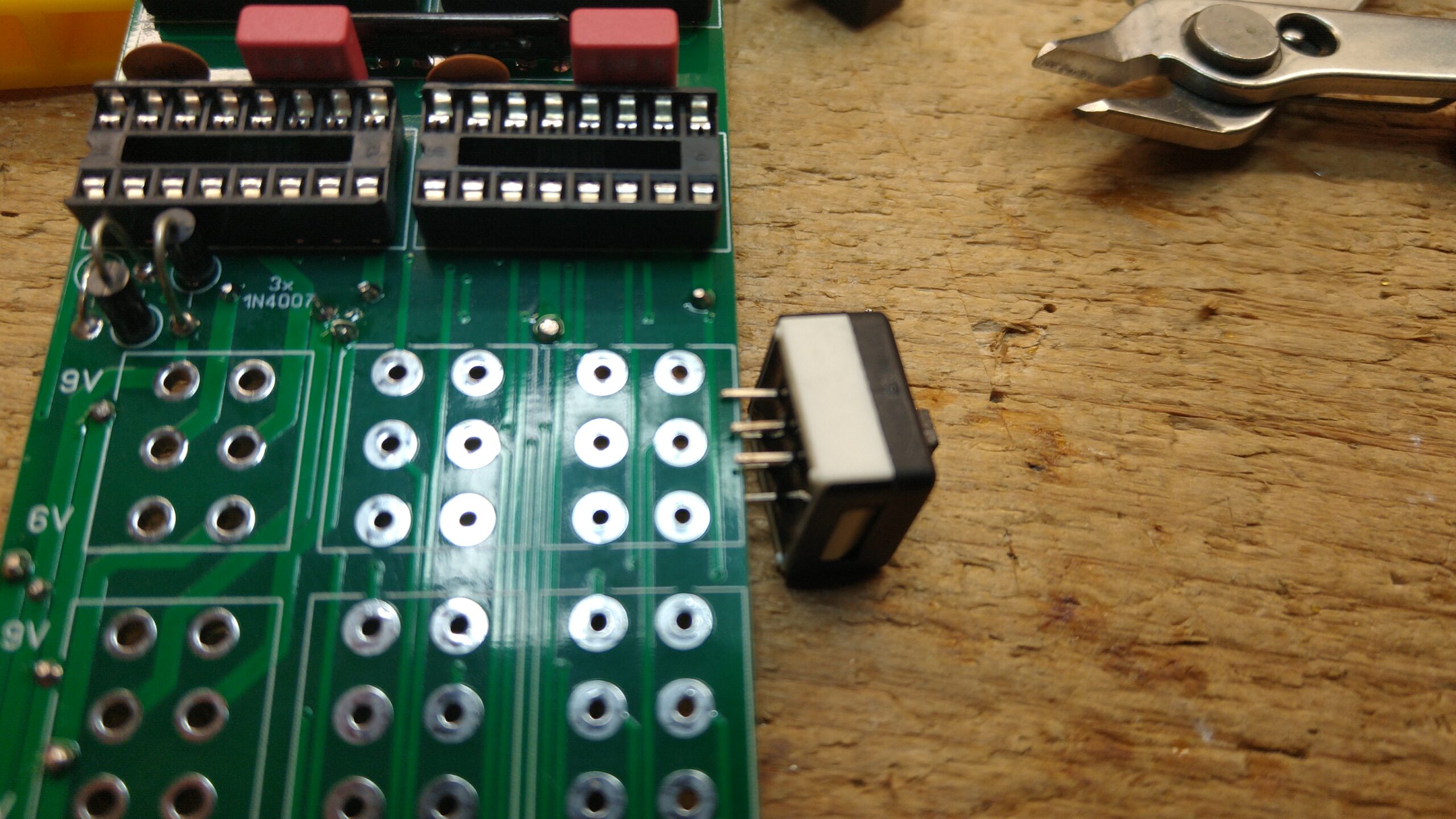
Leider hatte ich beim layouten der Schiebeschalter offenbar gepennt, oder waren im Internet falsche Maße angegeben 🤔
Egal. Was nicht passt wird passend gemacht 😉
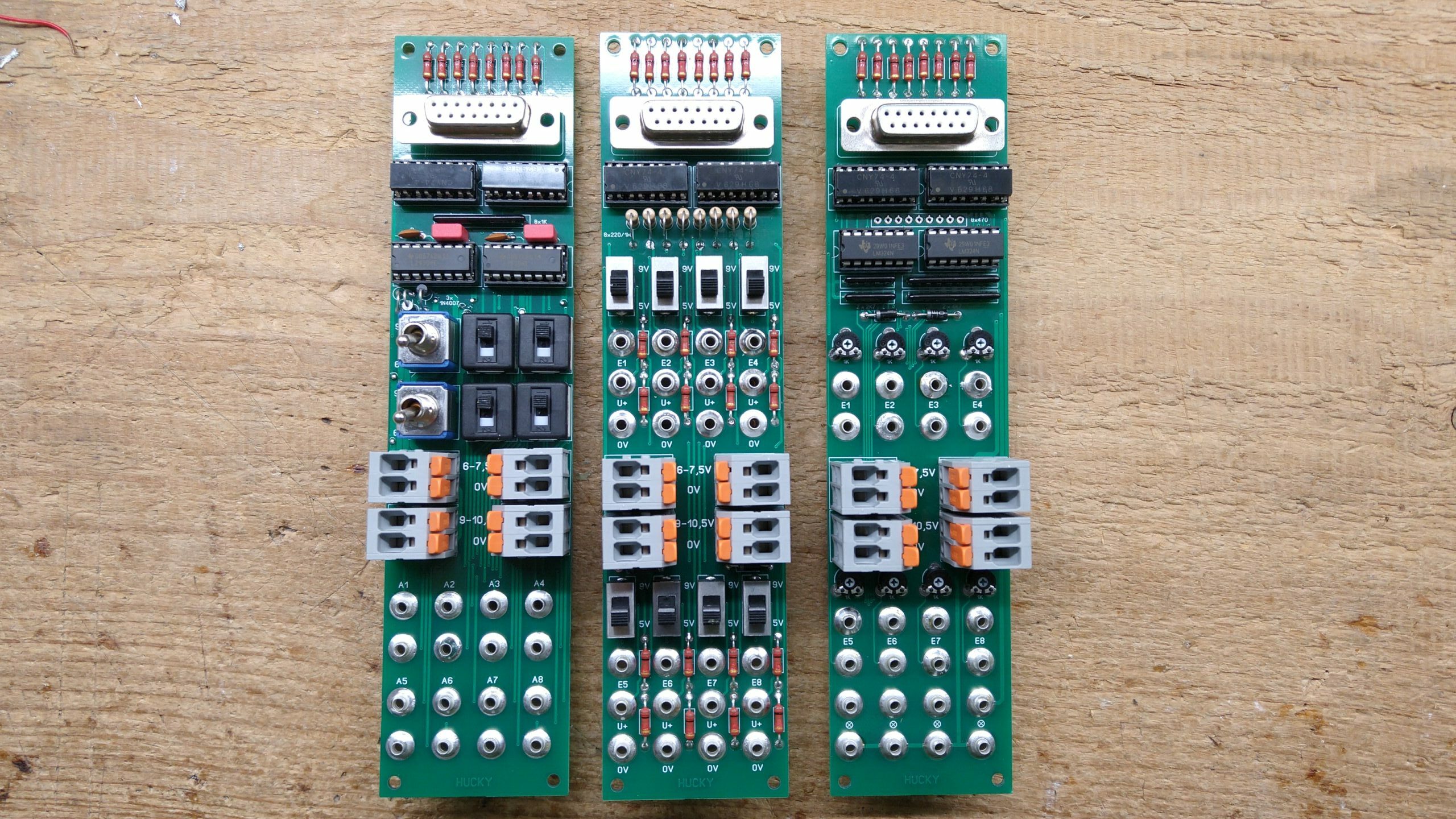
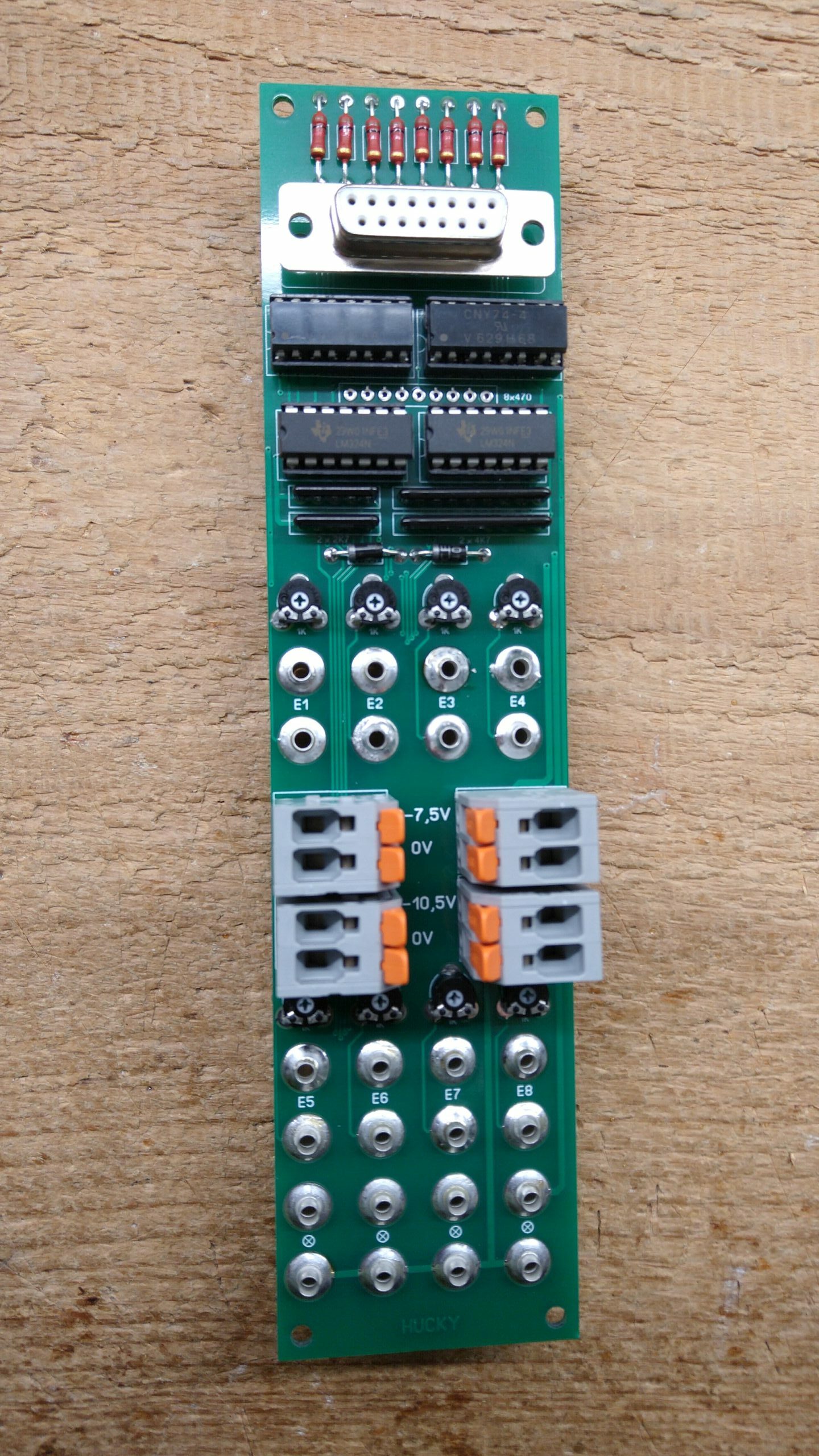
Hier dann noch ein Bild der Eingangsinterfaceplatine für die Initiatoren und Lichtschranken,
dazu ein Bild wo man schön sehen kann wie die Platinen exakt die gleiche Breite haben wie ein SPS Modul 🙂
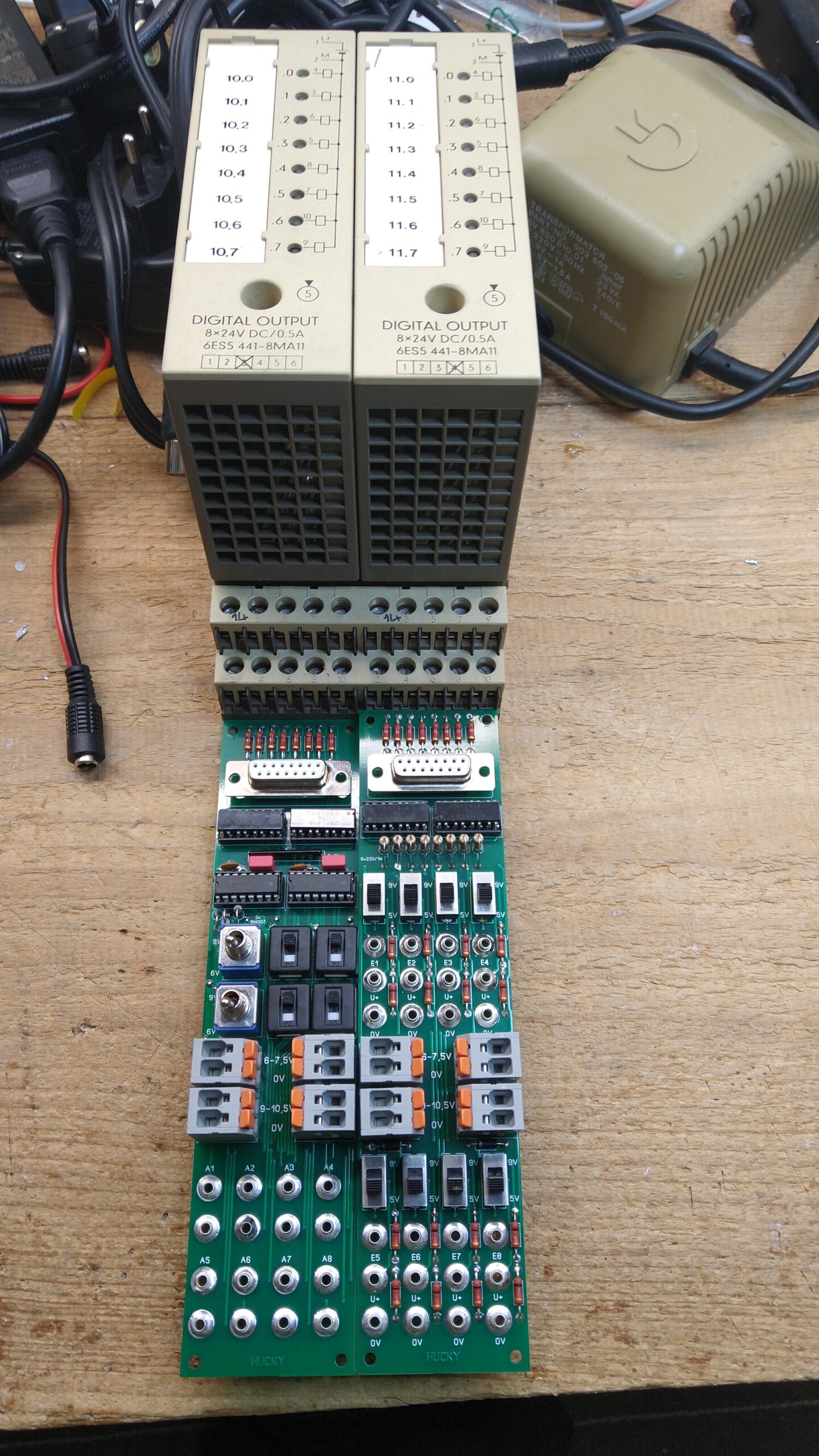
Und hier noch ein Bild wo alle drei Interfaces vereint sind 🤗